こんにちは。もるふぉです。
中国のナビで「信号あと23秒」と表示された話——高徳地図(Amap)ドライブモードの衝撃
「次の信号、あと23秒で青」——スマホのナビにそう表示されたとき、思わず二度見しました。
今仕事で上海に滞在しており、現地のタクシーで「高徳地図 ドライブモード」(Amap Driving Mode)を使うシーンに何度か立ち会ったんですが、正直、エンジニアとして腰が抜けました。
秒単位の信号カウントダウンだけじゃないんですよ。
「2つ先の交差点は赤が長いので速度を落とせ」と、まだ見えていない交差点の状況まで先回りして指示してくるんです。
日本のカーナビやGoogle Mapsしか使っていない自分にとって、これは完全に未来の景色でした。
「えっ、これどうやってるの?」と思い、調べ倒したのがこの記事の出発点です。
体験 → なぜ可能なのか → 国家レベルのインフラ戦略 → 日本との構造的な差 → 自動運転への接続、の順で読み解いていきますね。
実際のAmapドライブモードの画面
動画を見てもらうと、3つのポイントがすぐに伝わるはずです。
- 画面上部に「信号の残り秒数」がリアルタイムで表示される
- ハイライトされた推奨レーンが「30秒先」まで予告される
- オービス・速度取締機の位置が事前に警告される
この3つだけでも、日本のスマホナビでは実現できていない機能ですよね。
日本のナビには絶対ない、Amapドライブモードの機能一覧
自分が現地で実際に触って気づいた機能を整理すると、だいたいこんな感じです。
以下のテーブルは、日本の主要ナビとAmapを「ユーザーが体験する機能」の観点で比較した概観です。
単なる「便利ツール」ではなく、自動運転の手前にある情報インフラが、いまスマホアプリとして一般市民に配られているイメージなんですよ。
このあと、各機能の技術的な実装を分解していきます。
では、どうしてこれが実現できているのか。
次のセクションで、技術的な裏側を2つのルートに分けて解説します。
なぜ高徳地図(Amap)ドライブモードは信号の残り時間を知っているのか
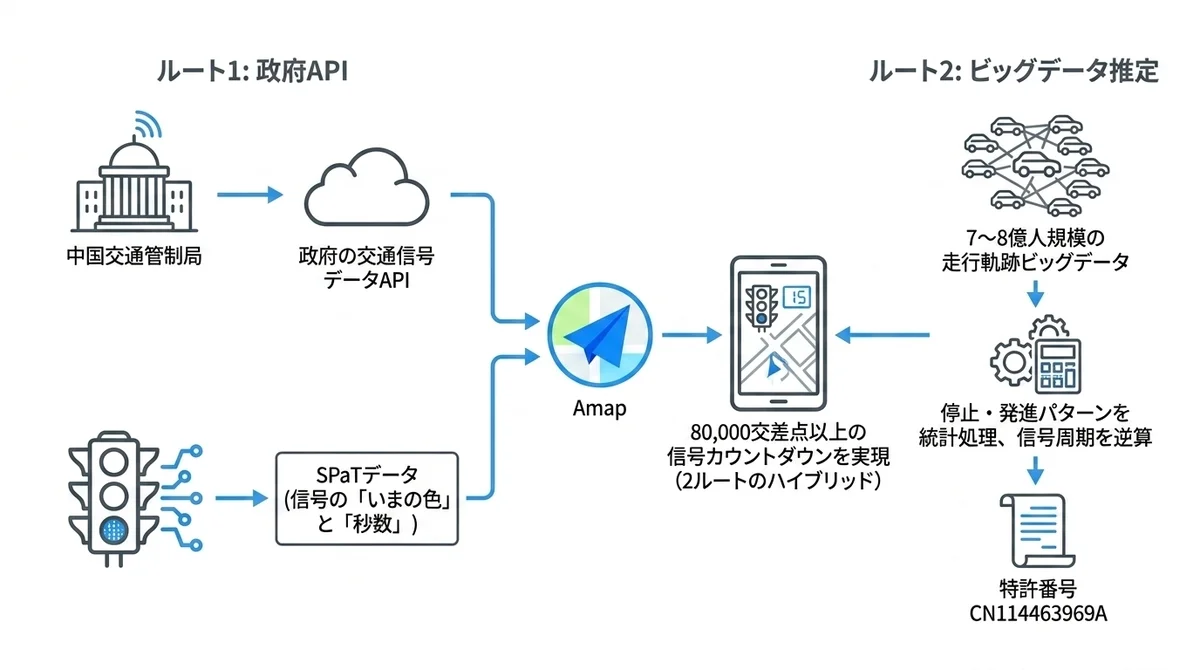
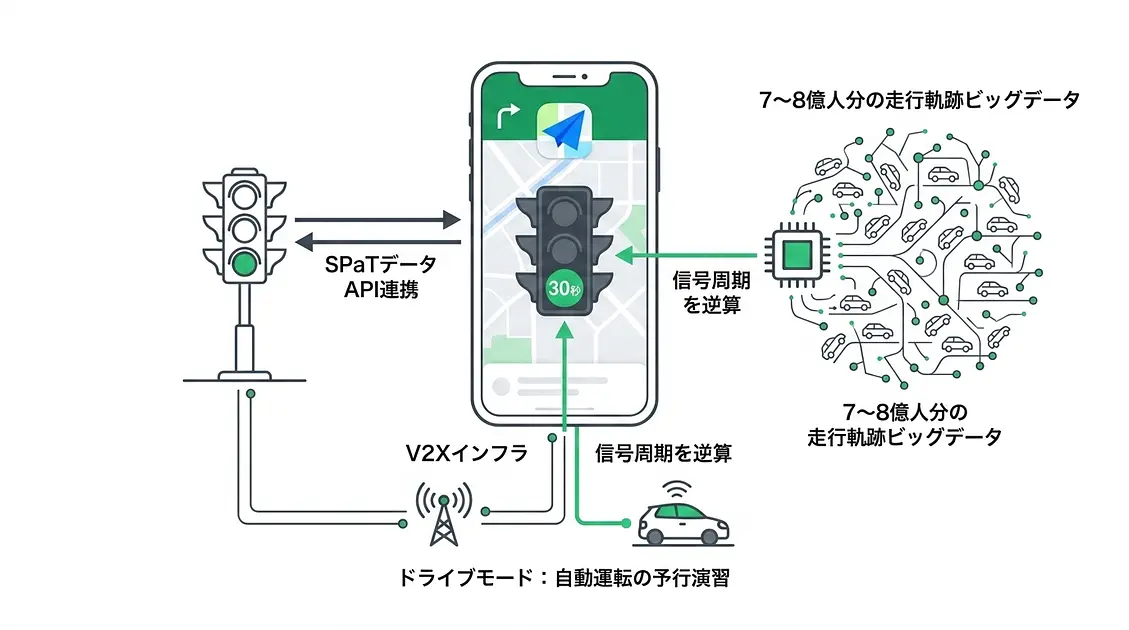
結論から言うと、Amapは「信号の残り秒数を知っている」のではなく、2つの方法を組み合わせて「ほぼ正確に推定できる」仕組みを作っています。
それが次の2ルートです。
ルート1: 政府の交通信号データAPIと連携している
中国の主要都市では、交通管制局が信号のSPaT(Signal Phase and Timing)データを民間にAPI開放しているケースがあります。
SPaTというのは、信号機の「いまの色」と「次に変わるまでの秒数」を含む標準的なメッセージ規格で、V2X(Vehicle-to-Everything)の中核データなんですね。
中国政府はこのSPaTデータを、都市単位で交通管理プラットフォームに集約し、Amapのようなプライベート事業者が接続できる形で開放しているわけです。
つまりAmapは「信号機を予測している」のではなく、「政府が持っている信号の状態を、そのまま受信して表示している」部分があるということ。
この時点で、自分は「データが公共財として開放されている前提の設計」に衝撃を受けました。
ルート2: 億単位の走行軌跡ビッグデータから信号タイミングを推定する
ただ、すべての交差点でSPaTが整備されているわけではありません。
そこで登場するのがビッグデータによる推定ルートです。
Amapは7〜8億人規模の月間アクティブユーザーの走行軌跡(GPSログ)を保持していて、同じ交差点で何千台・何万台の車両がどのタイミングで止まり、どのタイミングで発進したかを統計的に処理しています。
ざっくり言うと、「ここで止まっている車両の滞留時間が周期的に揃っているなら、それが信号のサイクルだ」というロジックなんですね。
たとえば、ある交差点で毎朝8時台に「45秒止まって、30秒動いて、また45秒止まる」というパターンが何千台分も積み重なれば、「この交差点の信号は45秒サイクルだ」と逆算できるわけです。
これをリアルタイムに学習・補正することで、APIが届いていない交差点でも「たぶんあと何秒で青になる」が推定できるわけです。
ハード側でインフラ整備が間に合わない場所を、ソフトウェアでカバーする。
この設計思想そのものが、自分は中国らしいと感じました。
Amapが2022年に取得した「赤信号継続時間マイニング特許」の中身
この推定ロジックは、実は2022年にAmap(運営元のAutoNavi/高徳軟件)が中国で特許を取得しています。
特許のタイトルは「赤信号継続時間のマイニング方法、電子機器、コンピュータプログラム製品」で、公開番号はCN114463969A。
特許の要点を自分の理解でまとめると、こんなステップです。
- 対象交差点の近傍を走った車両の軌跡データを取得する
- 非車両(歩行者・自転車など)の軌跡をフィルタで除外する
- ある時間帯で「最初に発進した車両」を特定する(=青になった瞬間の代理指標)
- これを複数日・複数時間帯で繰り返して周期を統計的に推定する
- リアルタイム軌跡で補正し続ける
つまりAmapは「信号を見ている」のではなく、「車の動き方から信号を逆算している」わけです。
いわば「犯罪捜査で残された痕跡から状況を再現する」みたいなアプローチで、信号機のデータが取れないなら行動パターンから間接的に読む——この発想の転換が面白いんですよ。
そしてこのアプローチが特許として制度化されているということは、国として「ソフトウェアでインフラを補完する」発想を後押ししているサインでもあります。
ここまでが、Amap側の技術的な裏側。
でも本当の驚きは、こうした仕組みが国家レベルのインフラ整備と接続している点にあるんですよ。
Amap 中国 自動運転 インフラを支える80,000交差点カバーと「車路協同」戦略
2022年8月、Amapは全国80,000交差点以上で信号カウントダウン機能を展開したと公表しています。
これは単一企業の努力だけで実現できるスケールではなく、中国の国家戦略としてのインフラ整備が背景にあります。
「車路協同」という国策——中国が10年前から進めてきたこと
中国には「車路協同」(しゃろきょうどう/Vehicle-Road Coordination)という大きな政策コンセプトがあります。
車両単体をスマートにするのではなく、道路側もインテリジェント化して両者で情報をやり取りするという発想で、欧米や日本が「車両に全部詰め込む」方向に進んでいるのと対照的です。
そして2024年1月、工業情報化部・公安部・交通運輸部など5省庁が合同で、2024〜2026年の「車・道・クラウド統合」応用試験事業(車路云一体化)を公布しました。
試験事業の中身は、5G網とV2Xインフラの整備、レベル2以上の自動運転車両の販売推奨、公共交通や物流配送での無人運転導入、自動駐車場の建設まで含まれています。
省庁横断で、明確な期限付き計画として推進できるのが、中国の意思決定スピードの特徴ですね。
C-V2Xを支えるファーウェイ・大唐電信の役割
インフラ協調の技術レイヤーを具体的に見ていくと、中心にあるのがC-V2X(Cellular V2X)という規格です。
C-V2XはLTE/5Gの無線通信をベースにしたV2X規格で、車両・路側機(RSU)・クラウドを低遅延で接続します。
これを推進している主要プレイヤーが、ファーウェイと大唐電信なんですね。
両社はC-V2X向けのチップセット、RSU、基地局を垂直統合で供給できる体制を持っていて、国のインフラ整備と通信機器ベンダーのビジネスがきれいに重なっています。
この垂直統合の強さは、欧米・日本のエコシステムには真似しづらい部分です。
北京・武漢の数千基のRSU(路側機)が生成するデータ量
RSU(Roadside Unit)というのは、道路脇に設置する小型の通信・センシング機器で、信号情報や車両位置をV2X経由で配信する装置です。
北京・武漢といった主要都市では、すでに数千基規模のRSUが設置されていて、SPaTや交通状況をリアルタイムで発信しています。
Amapのようなアプリは、このRSU由来のデータが政府プラットフォーム経由で流れ込んでくる前提で設計されているわけです。
つまり「ソフトで推定する」ルート2と、「ハードが送ってくる」ルート1の両輪で、80,000交差点超のカバーという規模が成立しているんですね。
ハードかソフトかではなく、両方に同時投資して全国展開する——このダブルトラック戦略が、次のセクションで話す日本との差の根っこにあります。
高徳地図 ドライブモード 自動運転インフラの技術スタックをエンジニア目線で整理する
ここから、Amapドライブモードの各機能を、それぞれ独立した技術レイヤーとして分解してみます。
ひとつひとつがスタック構造になっていて、設計思想が見えると面白いんですよ。
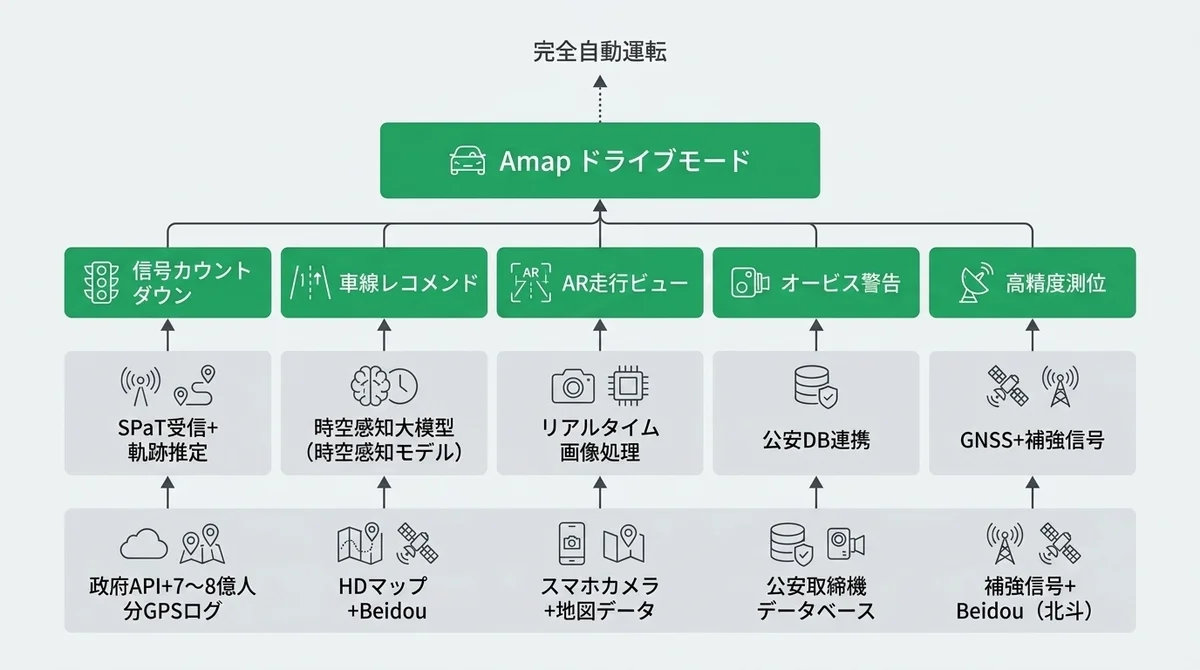
信号カウントダウン(赤の残り秒数+次の2〜3交差点先まで)
実装は先ほど説明した通り、SPaT受信と軌跡ビッグデータ推定のハイブリッドです。
面白いのは「次の信号だけでなく、2〜3先の交差点の状況」まで表示してくる点で、これは単純な1交差点の予測ではなく、ルート全体の信号計画と速度アドバイスを組み合わせているわけですね。
この機能が効いてくるのが、いわゆる「グリーンウェーブ」(青信号の連続通過)最適化です。
ドライバーが速度を少し調整するだけで、次の信号にちょうど青で突入できるという体験を、ナビが能動的に誘導してくる。
これは交通流全体の最適化アルゴリズムとしても非常にインパクトがあります。
車線レベルのナビゲーション(30秒先の推奨レーン)
Amapはバージョン15のアップデートで「30秒先の車線推奨」機能を強化したと公表しています。
これは「時空感知モデル(时空感知大模型)」と呼ばれる手法で、現在の速度・車線・交通状況から、30秒後に自分がどの車線にいるべきかを予測してリコメンドする仕組みです。
前提になるのが高精度地図(HDマップ)と、次で説明するBeidou高精度測位。
このレイヤーが揃って初めて、「いまその車線を譲った方がいい」みたいな車線単位のアドバイスが成立します。
AR走行ビューとオービス事前警告
AR走行ビューは、スマホのカメラ映像に信号・車線・矢印をオーバーレイする機能で、最近のスマホハードウェアとリアルタイム画像処理の組み合わせで実現されています。
オービスの事前警告は、中国の公安系の取締機データベースと連携していて、取締機の位置・種類・制限速度をドライブモード上に表示してきます。
日本では取締機の情報はレーダー探知機など専用ハードで対応するのが一般的ですが、中国ではナビアプリにそのまま統合されているんですよ。
Beidou高精度測位(1メートル以内)
忘れてはいけないのが、中国独自のGNSS(全球測位衛星システム)「Beidou(北斗)」です。
Beidouは高精度測位サービス(HAS相当)を備えていて、地上のAugmentation(補強信号)と組み合わせると、1メートル以内、場合によってはセンチメートル級の測位が可能になります。
車線レベルのナビゲーションが成立するのは、このBeidouが下支えしているからです。
GPSに依存しない自律的な測位インフラを持っている、というのも大きな戦略的資産ですね。
以下のテーブルは、各機能がどの技術レイヤーとデータソースに依存しているかを示した技術スタック図解です。
このスタックを眺めると、ドライブモードが「単機能の寄せ集め」ではなく、統合された技術ピラミッドであることが見えてきます。
そしてこのピラミッドの延長線上に、完全自動運転があるんですよ。
Amap vs 日本のナビ——自動運転 インフラ協調で生じた差の正体
ここで「日本はなぜ追いつけないのか」を、エンジニアとして構造的に見てみます。
批判したいのではなく、仕組みとして理解しておきたいポイントなんですよ。
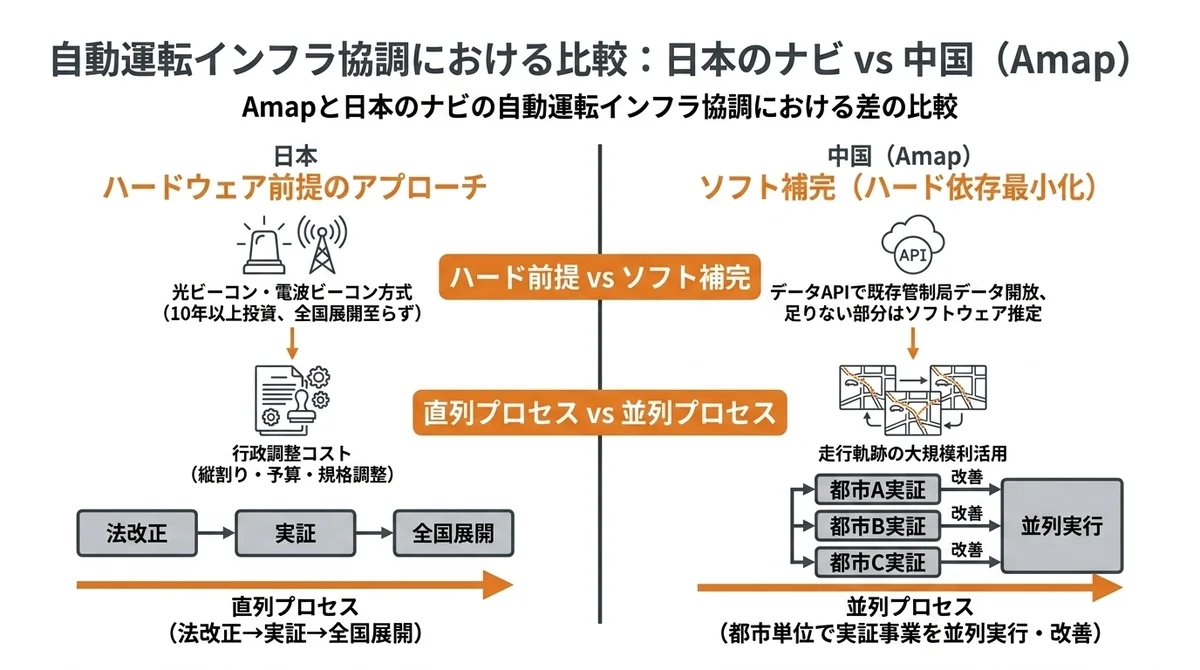
信号ビーコン方式に10年投資して進まなかった日本
日本でもかつて、国土交通省と警察庁がSPaT相当の情報を車両に伝える「光ビーコン」「電波ビーコン」方式を進めてきました。
ハードウェアを信号機に取り付けて車両に直接情報を送るアプローチで、技術としては筋の通った設計です。
ただ、予算・規格調整・警察庁と国交省の縦割り・自動車メーカー対応など、複数の調整コストが重なり、10年以上経っても全国展開には至っていません。
「ハードウェア前提」のアプローチは、技術としてエレガントでも、行政調整の重さに埋もれやすいという構造問題があります。
中国はここで、「APIで既存の管制局データを開放する」「足りない部分はソフトで推定する」という、ハード依存を最小化する方向に舵を切ったわけです。
なるほど、そういうことか——技術の優劣ではなく、「ハードを前提とするかソフトで補完するか」という設計判断の違いだったんですよ。
データ取得・開放の文化的・規制的な違い
もうひとつの大きな差がデータガバナンスです。
日本では走行軌跡データを企業が大規模に集めて学習に使うことに対して、個人情報保護の観点から慎重な運用が求められます。
一方、中国は公共インフラの一部として信号データをAPI開放し、走行軌跡の利活用も比較的前向きに進められる環境があります。
どちらが正しいという話ではなくて、「技術的にできること」と「制度的にやっていいこと」の境界線が国ごとに違う、という話です。
ただ、自動運転やV2Xのような領域では、この境界線の違いがそのままプロダクト開発スピードの差になります。
「走らせながら改善する」中国式 vs 「完璧を待つ」日本式
もう一歩踏み込むと、意思決定プロセス自体の差もあります。
中国は都市単位で実証事業を走らせ、問題があれば次の都市で改善する、という並列プロセスを回しています。
日本は「まず法改正 → 実証 → 全国展開」という直列プロセスで、どこかで止まると全体が止まる構造です。
これはアーキテクチャの問題ではなく、意思決定の問題なので、エンジニア個人の技術力では解決しにくい領域なんですよね。
逆に言うと、日本のエンジニアが中国の技術動向を理解しておくと、将来的に「制度が整った瞬間に一気にキャッチアップする」機会で有利になる、とも思っています。
Amap 中国 自動運転 インフラとしてのドライブモード——これは予行演習である
最後に、自分がこの記事でいちばん伝えたかった話をします。
Amapのドライブモードは、ただのナビアプリではなく、中国における自動運転の予行演習フェーズそのものだということです。
Amapに統合された自動運転タクシー(AutoX・WeRide)
Amapアプリの中からは、AutoXやWeRideといった自動運転タクシー(Robotaxi)の配車予約もできるようになっています。
一般ユーザーがナビアプリを起点にRobotaxiを呼び、降りて徒歩移動すると今度はドライブモードが走行モードとして起動する——このシームレスな体験設計が現実に動いているんですよ。
さらに2023年3月には、小馬智行(Pony.ai)が北京経済技術開発区(亦荘新城)の60平方キロメートル範囲で、完全無人Robotaxiの試験運営許可を取得しました。

運転手のいない自動運転タクシーがアプリ経由で呼べる世界が、すでに試験運用段階に入っています。
収集された走行データが自動運転の訓練データになる構造
ここで効いてくるのが、ドライブモードで収集されている走行データです。
ドライバーがAmapドライブモードを使って運転すると、軌跡・ブレーキタイミング・車線変更・交差点での停止位置などが、統計データとして集約されていきます。
このデータは、信号カウントダウンの精度向上だけでなく、同じエコシステム内の自動運転タクシーの走行ポリシー学習にも使えるわけです。
つまり、一般ユーザーが日々運転するほど、同じ会社の自動運転AIが賢くなる。
このフライホイールが回り始めている点が、中国の自動運転エコシステムの最大の強みだと自分は見ています。
日本のエンジニアとして、この技術差をどう捉えるか
最後に、日本のエンジニアとしてこれをどう捉えるか、という話をします。
自分が思っているのは、危機感を煽るよりも「何が学べるか」を整理する方が生産的だということです。
まず、軌跡ビッグデータから信号周期を推定するアルゴリズムは、交通以外にもサプライチェーン監視・IoT予測・行動分析など応用範囲が広いです。
「観測できないものを、行動パターンから逆算する」というアプローチは、いまやっているプロジェクトでそのまま使えるかもしれません。
次に、RSUやV2Xを前提にしたシステム設計は、将来日本でもインフラ整備が進んだときに必ず問われる知識になります。
インフラ協調型アーキテクチャを理解しておくだけで、その瞬間に即戦力になれるんですよ。
そして、技術を動かすのは仕組みや制度でもあるので、海外の制度設計を技術者として理解しておくと、日本でプロダクトを作るときの現実的な制約認識が鋭くなります。
中国の仕組みをそのまま日本に持ってくるのは、法律的にも文化的にも難しいです。
でも、原理や設計思想を理解しておくことは、日本のエンジニアにとって大きな武器になると思うんですよね。
自分も今回、高徳地図ドライブモードを現地で触って、頭が一気にアップデートされました。
もし中国に行く機会があれば、ぜひAmapをダウンロードして、実際のドライブモードを体験してみてください。
「あ、これが5年後の日本だ」という景色が、きっと見えるはずです。
技術書を10冊読むより、一度乗ったほうが景色が変わります。
ここまで読んでくれてありがとうございました。
引き続きAI・自動運転・ソフトウェアエンジニアリングの話をXとnoteでも書いているので、よかったらフォローしてもらえると嬉しいです。
- 7
- 0

日系メガベンチャー → 外資系ITプログラマー → ベンチャーCTOを経て独立。 現在はAI駆動でコードを読まずに開発しています。
クリエイターの他の記事
-
コードを読まないAIエンジニア
- 34
- 1
-
- 25
- 1
-
- 10
- 1
-
- 8
- 0
こちらもおすすめ
-
- 6
- 0
-
プロンプト画伯
- 1
- 0
-
 ゆい@海外AI副業ラボ
ゆい@海外AI副業ラボ
- 4
- 0
-
- 2
- 0
-
- 2
- 0
-
- 1
- 0
-
- 5
- 0
-
- 3
- 0
-
- 4
- 0
-
- 1
- 0
-
- 3
- 0
-
- 2
- 0
-
AI脱社畜
- 3
- 0
-
- 3
- 0
-
ゆい@海外AI副業ラボ
- 5
- 0
-
- 2
- 0
-
- 2
- 0
-
- 1
- 0
-
- 3
- 0
-
- 2
- 0











AimanaVo
あなたのAI知見も、資産にしませんか?
読んだ・試した・気づいた — そんな体験が誰かの力になる。 有料記事で収益化も、アフィリエイトも。
💬 コメント
ログイン か 会員登録 するとコメントできます